
Dieser Gastbeitrag wurde ursprünglich von Charles Guan verfasst. Er hat am MIT Maschinenbau studiert und war dort in den Bereichen Werkstatt und Konstruktion auch als Dozent tätig. Jetzt arbeitet er als beratender Ingenieur. Außerdem baut er Kampfroboter. Markforged sponsert seine Teilnahme an BattleBots, ABCs Wettbewerb für Kampfroboter. Sehen Sie sich seine Website und Facebookseite an.
Kampfroboter – Hintergrundwissen

Bronco, ein pneumatischer Flipper in BattleBots (Quelle: BattleBots).
In der Welt der Kampfroboter sieht man meist Standardkonstruktionen. Ab und zu nehmen aber außergewöhnliche Roboter an den Kämpfen teil. Einer davon ist der “flywheel flipper”. Superschnelle Flipperarme, mit denen der Gegner in die Luft geschleudert wird, sind nichts ungewöhnliches. Normalerweise sind sie pneumatisch betrieben. So bringen sie viel Leistung, brauchen aber viel Energie. Selbst den besten Flippern fehlt diese schon nach wenigen guten Angriffen. Der elektrische flywheel flipper kombiniert die hohe Energiedichte von Batterien mit der vorhandenen kinetischen Energie des Roboters.
Die Energie musste in eine schnell und kontrolliert freisetzbare Form gebracht werden.Man braucht zuverlässige Schaltmechanik, konsequentes Timing und progressive Beschleunigung, während der finanzielle Rahmen eingehalten wird.
Man kann sich nur an wenigen Beispielen orientieren. In der Gewichtsklasse von 3 bis 30 Pfund gibt es eine Serie von Zac O’Donell, darunter auch sein Roboter Magneato. Auch Dale Heatherington hat einige erfolgreiche Konstruktionen entwickelt. Unter den größeren Robotern setzt Warrior den Maßstab.

Magneato, ein 30-Pfund-Flipper (Quelle: SPARC Forum).

Der Warrior, auch ein Teilnehmer der BattleBots (Quelle: BattleBots).
Die beiden Roboter funktionieren nach unterschiedlichen Konzepten. Dies ist ein Hinweis auf den derzeitigen Entwicklungsstand. Die optimale Lösung für ein Problem wird von anderen Konstrukteuren übernommen. Deswegen sind die Roboter einander oft ähnlich.
Die neue Bewaffnung sollte aus zwei koaxial angeordneten Komponenten bestehen, um neue strategische Möglichkeiten zu schaffen. Ein 3-Pfund-Roboter hat die richtige Größe, um die nötigen Komponenten mit dem Mark Two herzustellen.

Minotaur, ein weiterer BattleBot mit einer klassischen vertikalen Spinner-Konstruktion (Quelle: BattleBots).
Das 3D-gedruckte Getriebe konstruieren
Ein Planetengetriebe mit verschiedenen verbundenen Zahnrädern (Quelle: Mathworks).
Die größte Schwierigkeit ist, ein hohes Übersetzungsverhältnis (20:1 und höher) je nach Bedarf ein- und aussetzen zu können. Ein Verteilergetriebe mit Splitter löst das Problem. Ein dem von Toyota entwickelten Hybrid-Synergy-Drive ähnliches Planetengetriebe kommt zum Einsatz.
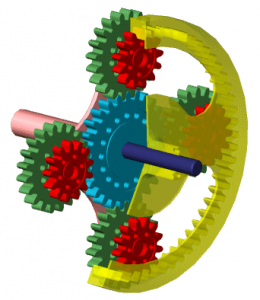
Alle Roboterkomponenten müssen möglichst klein sein. Nylon wäre für die winzigen Zahnradzähne zu flexibel. Onyx ist fest genug, um den großen und spontanen Belastungen im Kampf standzuhalten.

Ein Planetengetriebe aus Onyx. Wenn eins der koaxialen großen Hohlräder gestoppt wird, dreht sich das andere.
Aufrüsten für den Roboterkrieg
Das Getriebe muss in den Roboter eingebaut werden. Hier sehen Sie eine Darstellung der Gesamtkonstruktion:

Der erste Entwurf des Kampfroboters mit Spinner und Flipper. Die beiden Waffen sind koaxial angeordnet und man kann beliebig von der einen zur anderen wechseln.
Durch den dreieckigen Grundkörper gibt es kein Oben und Unten. Der Roboter kann in beiden Positionen gleichermaßen eingesetzt werden. Das runde silberne Teil links ist ein Spinner aus Aluminium. Zylinderkopfschrauben dienen als Zähne. Das Planetengetriebe ist in Schwarz dargestellt. Stoppt man die Rotation des einen Rings, dreht sich der andere. Die beiden Flipper aus Metall drehen sich gegeneinander. Während der eine gegen den Boden drückt, kann der andere den Gegner in die Luft heben.
Es müssen noch einige geometrische Details überarbeitet werden. Das Konzept ist aber vielversprechend.
Hier wird das System demonstriert:
Hier sind einige weitere Bilder von der Konstruktion:

Der neuere 3D-gedruckte Mechanismus von innen.

Das zusammengebaute Getriebe des flywheel flippers.
Photos von Charles Guan
Dieser Artikel wurde ursprünglich im Blog von Markforged veröffentlicht. Hier kommen Sie zum Originalartikel.
Übersetzt von Antje Kasemann


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Hinterlasse einen Kommentar